Pipeline
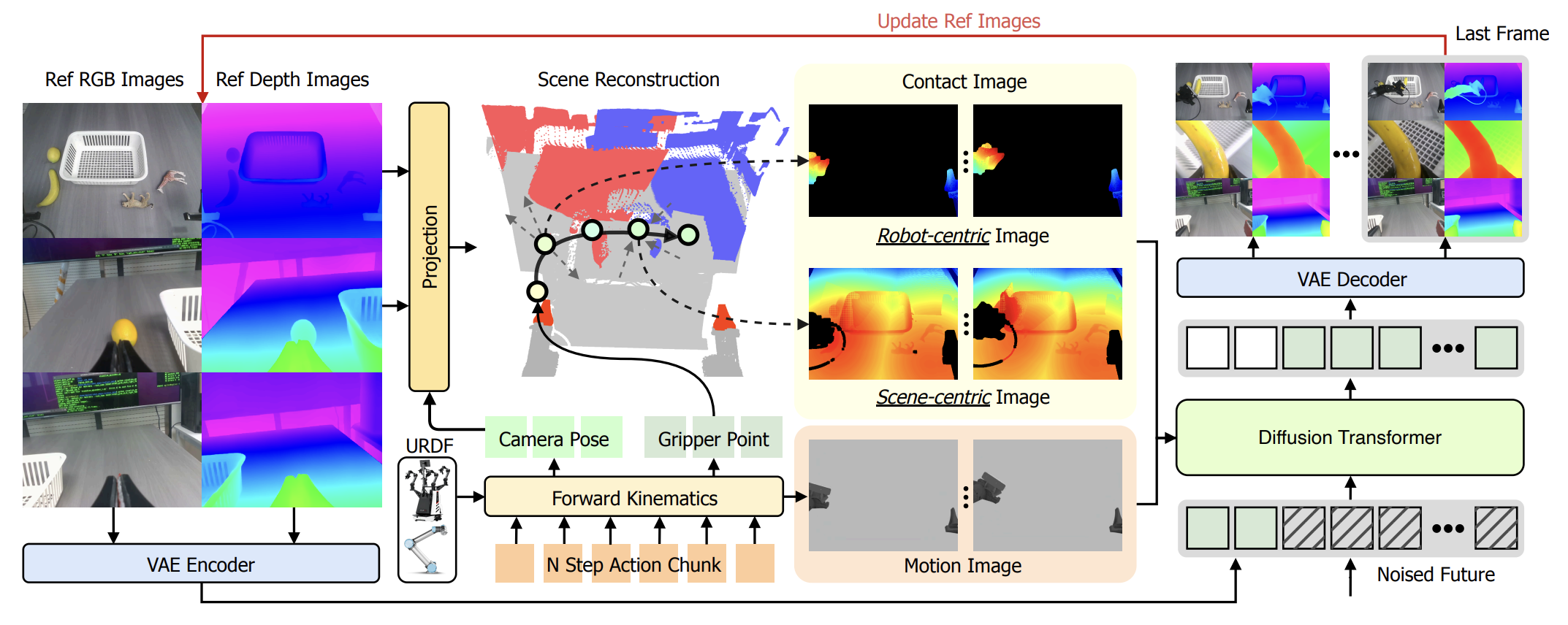
Given a reference RGB observation and a future action sequence, iMaC converts joint actions into future robot configurations through URDF and forward kinematics. Rendered robot observations provide motion-image controls. Auxiliary depth prediction and pointcloud geometry provide contact-image controls that describe current scene to future gripper distances and future robot to current scene distances. The controls are injected as video/image controls into the future-video world model.